curl ⋅ lgr ⋅ devilcat2 ⋅ nemo ⋅ tiggerbot2 ⋅ logo ⋅ crunch ⋅ devilcat ⋅ tiggerbot
Tiggerbot
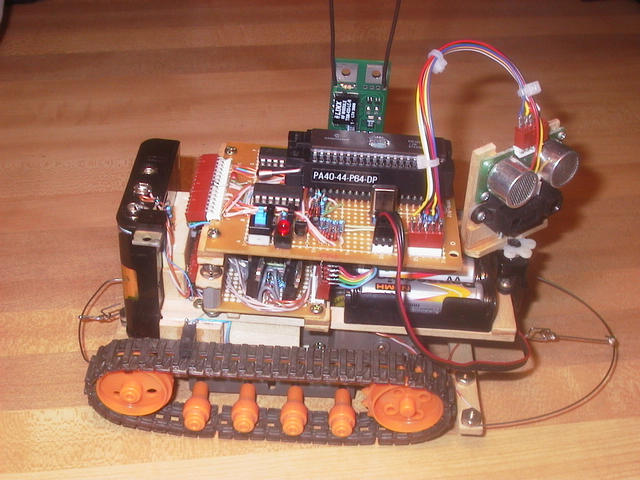
tiggerbot.jpg |
Mechanical
Tiggerbot was built from a Tamiya bulldozer kit, which proved a bit underpowered for all the stuff that was piled on top of it. The treads had very inconsistent performance depending on what type of floor they were on; it could drive straight over anything, but turning didn't really work on carpet.Electrical
Tiggerbot had two 4xAA battery packs. The motors were driven by transistor H-bridges, and everything was controlled by a PIC16C74. This was an EPROM device and had to be cooked in UV to be erased. The sensors were a sonar and an infra-red sensor mounted together on a micro-rc-servo as well as a bump sensor. It had a 433MHz AM radio that let it talk to a computer at 4800 baud.
© 2000-now
chris@jormungand.net